
China is taking a pragmatic approach to its lunar ambitions, opting for a robust, wheeled semi-humanoid robot as a core component of its planned International Lunar Research Station (ILRS). This isn’t about replicating science fiction; it’s about solving the very real engineering challenges of operating effectively on the Moon – and doing so before the US-led Artemis program fully matures. While the US focuses heavily on returning humans to the lunar surface, China is quietly building a robotic infrastructure that could establish a persistent, and potentially dominant, presence.
- Pragmatic Robotics: China is prioritizing robotic solutions for lunar construction and research, acknowledging the cost and complexity of sustained human presence.
- Dexterity & Mobility: The new robot design combines human-like manipulation capabilities with the stability and speed of wheeled locomotion, a proven approach seen in previous lunar and Martian rovers.
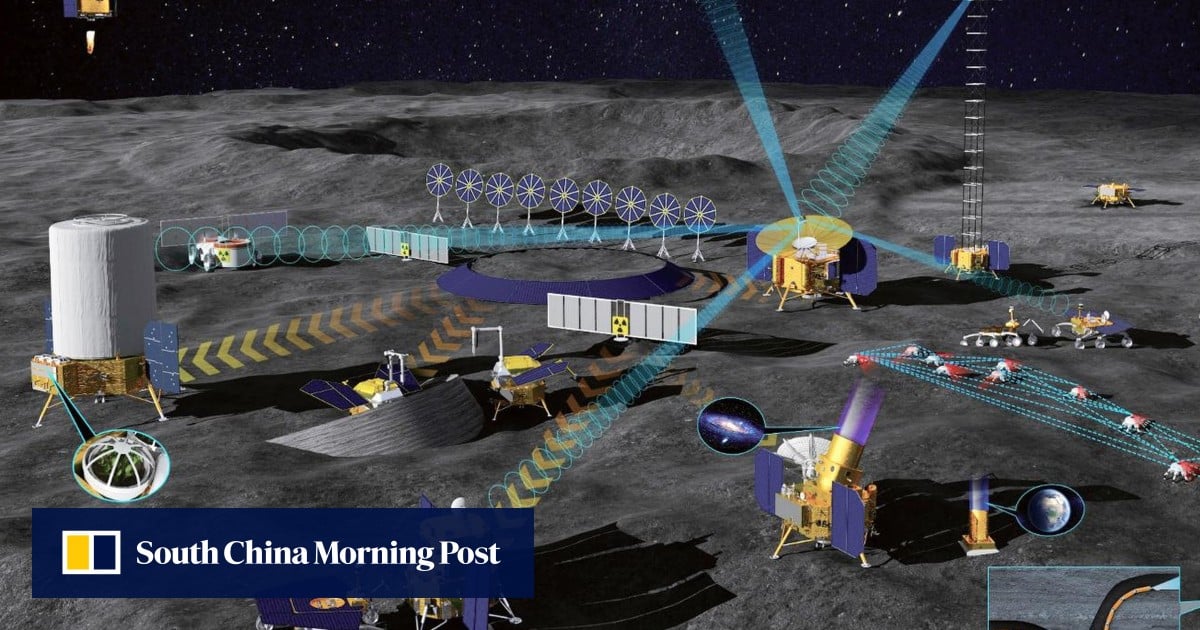
- ILRS Focus: This development is directly tied to China’s 2035 timeline for establishing a fully functional lunar research station, signaling a long-term commitment to lunar exploration.
The choice of a wheeled platform, rather than a bipedal robot, is significant. As the researchers point out, wheeled systems – exemplified by China’s Yutu and Zhurong rovers – offer superior speed and stability, crucial for construction and maintenance tasks. The semi-humanoid design, featuring a 180-degree rotating waist and a four-degree-of-freedom hand, addresses the need for delicate manipulation. This isn’t about creating a robot *replacement* for astronauts, but a robotic assistant capable of tasks too dangerous, tedious, or precise for humans in a spacesuit. The metal mesh wheel design with steel-wire treads is a clever solution to the challenges of the rugged lunar terrain and extreme temperatures.
This development builds on existing robotic research. NASA’s Robonaut, deployed to the ISS in 2011, demonstrated the value of humanoid robots in assisting astronauts with routine and hazardous tasks. However, Robonaut was largely confined to the interior of the space station. China’s design is explicitly intended for surface operations, a far more demanding environment. The recent advancements in China’s “Linkerbot” technology, providing robots with human-like dexterity, are directly incorporated into this new lunar robot, showcasing a clear progression in their robotics capabilities.
The Forward Look
The unveiling of this robot design isn’t an isolated event. It’s a key indicator of China’s broader strategy for lunar development. Expect to see increased investment in AI and autonomous systems to enhance the robot’s capabilities, allowing it to operate with minimal human oversight. The next logical step will be prototyping and rigorous testing in simulated lunar environments, followed by potential deployment on future Chang’e missions as precursors to the ILRS. More importantly, watch for international collaboration opportunities surrounding the ILRS. China has actively sought partners for the station, and this robotic infrastructure could be a key offering to attract participation. The success of this program will likely determine whether China establishes itself as the dominant force in lunar exploration and resource utilization in the coming decades – a prospect the US is actively trying to counter with its own Artemis program and commercial partnerships.
Discover more from Archyworldys
Subscribe to get the latest posts sent to your email.